


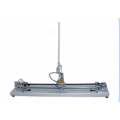


一. 直线一级倒立摆
a. 应用介绍:
倒立摆系统是一个非线性自然不稳定系统,是进行控制理论教学及开展各种控制实验的理想实验平台。许多抽象的控制概念如控制系统的稳定性、可控性、系统收敛速度和系统抗干扰能力等,都可以通过倒立摆系统直观的表现出来。除教学用途外,倒立摆系统的高阶次、不稳定、多变量、非线性和强耦合等特性使得许多现代控制理论的研究人员一直将它视为研究对象。他们不断从研究倒立摆控制方法中发掘出新的控制方法,并将其应用于航天科技和机器人学等各种高新科技领域。以直线运动模块为基础平台,可以轻松的构建10多种控制教学实验平台,全方位满足控制教学和研究的需要。在自动控制领域中,倒立摆仿真或实物控制实验,已成为检验一个新的控制理论是否有效的试金石,同时也是产生一个新的控制方法必须依据的基础实验平台。为全方位满足控制教学和研究的需要,采用开放的控制解决方案和工业化、模块化的机械结构研发出了一系列倒立摆实验设备。
b. 技术参数
基于PC 和DSP运动控制器的开放式硬件平台;
通用智能运动控制开发平台,采用C++面向对象的设计方法;
配备集成语言编程系统和图形示教软件
配套内容详尽的使用手册和实验指导书,通过实例演示,引导用户学习如何基于运动控制器开发各种应用软件系统
|
开放式硬件平台
|
电机控制信号 Ø 可控轴数(选配):2,4 Ø 每轴输出差分脉冲,**高频率:1MHZ Ø 每轴输出电压(SV系列),范围:-10V-+10V,精度:16位 Ø 每轴编码器反馈通道,四倍频可达8MHZ Ø 每轴Home、Index及探针硬件捕获功能 Ø 每轴正负限位及伺服报警输入 运动控制功能 Ø 点位控制:每轴梯形曲线,S形曲线,JOG模式运动规划 Ø 同步控制:每轴电子齿轮运动规划 Ø 每轴手脉跟随功能 Ø 支持直线插补、圆弧插补 Ø 插补方式:立即插补、缓冲区插补 Ø 支持闭环(SV系列)与开环控制 Ø 数字滤波器:PID+速度前馈+加速度前馈 |
|
I/O功能 |
Ø 16路通用数字输入/16路通用数字数出 Ø 8路模拟量输入,精度12位,范围:-10-+10V |
|
工作环境 |
Ø 温度: 0~55℃ Ø 湿度: 5%~90%无凝结 |
|
外形尺寸 |
Ø (长×宽×高)(mm):1000×279×708 |
|
可做实验 |
Ø 根轨迹控制实验 Ø 频率响应控制实验 Ø PID控制实验 Ø 状态空间极点配置控制实验 Ø 线性二次**控制LQR控制实验 Ø |